12 - Implementation of time blocking for compression/serialization and de-serialization/de-compression of wavefields with Devito operators
Introduction
The goal of this tutorial is to prototype the compression/serialization and de-serialization/de-compression for wavefields in Devito. The motivation is using seismic modeling operators for full waveform inversion (FWI). Some of the steps in FWI require the use of previously computed wavefields, and of particular interest the adjoint of the Jacobian linearized operator – an operator that maps data perturbation into velocity perturbation and is used to build FWI gradients – requires a zero-lag temporal correlation with the wavefield that is computed with the nonlinear source.
There are implemented alternatives to serialization/de-serialization like checkpointing, but we investigate the serialization option here. For more information on checkpointing, please see the details for pyrevolve, a python implementation of optimal checkpointing for Devito (https://github.com/devitocodes/pyrevolve).
We aim to provide a proof of concept for compression/serialization and de-serialization/de-compression of the nonlinear wavefield. We will achieve this via time blocking: we will run a number of time steps in the generated c kernel, and then return control to Python for compression/serialization (for the nonlinear forward operator), and de-serialization/de-compression (for the linearized Jacobian forward and adjoint operators).
In order to illustrate the use case for serialization, we outline the workflow for computing the gradient of the FWI objective function, ignoring a lot of details, as follows:
Generate the nonlinear forward modeled data at the receivers \(d_{mod}\)\[
d_{mod} = F m
\]
Compress and serialize the nonlinear source wavefield to disk in time blocks during computation of 1. The entire nonlinear wavefield is of size \([nt,nx,nz]\) in 2D, but we deal with a block of \(M\) time steps at a time, so the size of the chunk to be compressed and serialized is \([M,nx,nz]\).
Compute the data residual \(\delta r\) by differencing observed and modeled data at the receivers \[
\delta r = d_{obs} - d_{mod}
\]
Backproject the data residual \(\delta r\) via time reversal with the adjoint linearized Jacobian operator.
De-serialize and de-compress the nonlinear source wavefield from disk during computation in step 4, synchronizing time step between the nonlinear wavefield computed forward in time, and time reversed adjoint wavefield. We will deal with de-serialization and de-compression of chunks of \(M\) time steps of size \([M,nx,nz]\).
Increment the model perturbation via zero lag correlation of the de-serialized nonlinear source wavefield and the backprojected receiver adjoint wavefield. Note that this computed model perturbation is the gradient of the FWI objective function. \[
\delta m = \bigl( \nabla F\bigr)^\top\ \delta r
\]
Please see other notebooks in the seismic/self=adjoint directory for more details, in particular the notebooks describing the self-adjoint modeling operators.
Self-adjoint notebook description
name
Nonlinear operator
sa_01_iso_implementation1.ipynb
Jacobian linearized operators
sa_02_iso_implementation2.ipynb
Correctness tests
sa_03_iso_correctness.ipynb
Outline
Definition of symbols
Description of tests to verify correctness
Description of time blocking implementation
Compression note – use of blosc
Create small 2D test model
Implement and test the Nonlinear forward operation
Save all time steps
Time blocking plus compression/serialization
Ensure differences are at machine epsilon
Implement and test the Jacobian linearized forward operation
Save all time steps
Time blocking plus compression/serialization
Ensure differences are at machine epsilon
Implement and test the Jacobian linearized adjoint operation
Save all time steps
Time blocking plus compression/serialization
Ensure differences are at machine epsilon
Discussion
Table of symbols
We show the symbols here relevant to the implementation of the linearized operators.
Symbol
Description
Dimensionality
\(m_0(x,y,z)\)
Reference P wave velocity
function of space
\(\delta m(x,y,z)\)
Perturbation to P wave velocity
function of space
\(u_0(t,x,y,z)\)
Reference pressure wavefield
function of time and space
\(\delta u(t,x,y,z)\)
Perturbation to pressure wavefield
function of time and space
\(q(t,x,y,z)\)
Source wavefield
function of time, localized in space to source location
\(r(t,x,y,z)\)
Receiver wavefield
function of time, localized in space to receiver locations
\(\delta r(t,x,y,z)\)
Receiver wavefield perturbation
function of time, localized in space to receiver locations
\(F[m; q]\)
Forward nonlinear modeling operator
Nonlinear in \(m\), linear in \(q\): \(\quad\) maps \(m \rightarrow r\)
\(\nabla F[m; q]\ \delta m\)
Forward Jacobian modeling operator
Linearized at \([m; q]\): \(\quad\) maps \(\delta m \rightarrow \delta r\)
\(\bigl( \nabla F[m; q] \bigr)^\top\ \delta r\)
Adjoint Jacobian modeling operator
Linearized at \([m; q]\): \(\quad\) maps \(\delta r \rightarrow \delta m\)
Description of tests to verify correctness
In order to make sure we have implemented the time blocking correctly, we numerically compare the output from two runs: 1. all time steps saved implementation – requires a lot of memory to hold wavefields at each time step 1. time blocking plus compression/serialization implementation – requires only enough memory to hold the wavefields in a time block
We perform these tests for three phases of FWI modeling: 1. nonlinear forward: maps model to data, forward in time 1. Jacobian linearized forward: maps model perturbation to data perturbation, forward in time 1. Jacobian linearized adjoint: maps data perturbation to model perturbation, backward in time
We will design a small 2D test experiment with a source in the middle of the model and short enough elapsed modeling time that we do not need to worry about boundary reflections for these tests, or running out of memory saving all time steps.
Description of time blocking implementation
We gratefully acknowledge Downunder Geosolutions (DUG) for in depth discussions about their production time blocking implementation. Those discussions shaped the implementation shown here. The most important idea is to separate the programmatic containers used for propagation and serialization. To do this we utilize two distinct TimeFunction’s.
Propagation uses TimeFunction(..., save=None)
We use a default constructed TimeFunction for propagation. This can be specified in the constructor via either save=None or no save argument at all. Devito backs such a default TimeFunction by a Buffer of size time_order+1, or 3 for second order in time. We show below the mapping from the monotonic ordinary time indices to the buffered modulo time indices as used by a Buffer in a TimeFunction with time_order=2.
Important note: the modulo indexing of Buffer is the reason we will separate propagation from serialization. If we use a larger Buffer as the TimeFunction for propagation, we would have to deal with the modulo indexing not just for the current time index, but also previous and next time indices (assuming second order in time). This means that the previous and next time steps can overwrite the locations of the ordinary time indices when you propagate for a block of time steps. This is the reason we do not use the same TimeFunction for both propagation and serialization.
Generated code for a second order in time PDE
We now show an excerpt from Devito generated code for a second order in time operator. A second order in time PDE requires two wavefields in order to advance in time: the wavefield at the next time step \(u(t+\Delta t)\) is a function of the wavefield at previous time step \(u(t-\Delta t)\) and the wavefield at the current time step \(u(t)\). Remember that Devito uses a Buffer of size 3 to handle this.
In the generated code there are three modulo time indices that are a function of ordinary time and cycle through the values \([0,1,2]\): * t0 – current time step * t1 – next time step * t2 – previous time step
We show an excerpt at the beginning of the time loop from the generated code below, with ordinary time loop index time. Note that we have simplified the generated code by breaking a single for loop specification line into multiple lines for clarity. We have also added comments to help understand the mapping from ordinary to modulo time indices.
for (int time = time_m; time <= time_M; time += 1) {
t0 = (time + 0)%(3); // time index for the current time step
t1 = (time + 1)%(3); // time index for the next time step
t2 = (time + 2)%(3); // time index for the previous time step
// ... PIE: propagation, source injection, receiver extraction ...
}
It should be obvious that using a single container for both propagation and serialization is problematic because the loop runs over ordinary time indices time_m through time_M, but will access stored previous time step wavefields at indices time_m-1 through time_M-1 and store computed next time step wavefields in indices time_m+1 through time_M+1.
We will use an independent second Buffer of size \(M\) for serialization in our time blocking implementation. This second TimeFunction will also use modulo indexing, but by design we only access indices time_m through time_M in each time block. This means we do not need to worry about wrapping indices from previous time step or next time step wavefields.
Minimum and maximum allowed time index for second order PDE
It is important to note that for a second order in time system the minimum allowed time index time_m will be \(1\), because time index \(0\) would imply that the previous time step wavefield \(u(t-\Delta t)\) exists at time index \(-1\), and \(0\) is the minimum array location.
Similarly, the maximum allowed time index time_M will be \(nt-2\), because time index \(nt-1\) would imply that the next time step wavefield \(u(t+\Delta t)\) exists at time index \(nt\), and \(nt-1\) is the maximum array location.
Flow charts for time blocking
Putting this all together, here are flow charts outlining control flow the first two time blocks with \(M=5\).
Time blocking for the nonlinear forward
Time block 1
Call generated code Operator(time_m=1, time_M=5)
Return control to Python
Compress indices 1,2,3,4,5
Serialize indices 1,2,3,4,5
(access modulo indices 1%5,2%5,3%5,4%5,5%5)
Time block 2
Call generated code Operator(time_m=6, time_M=10)
Return control to Python
Compress indices 6,7,8,9,10
Serialize indices 6,7,8,9,10
(access modulo indices 6%5,7%5,8%5,9%5,10%5)
Time blocking for the linearized Jacobian adjoint (time reversed)
Time block 2
De-serialize indices 6,7,8,9,10
De-compress indices 6,7,8,9,10
(access modulo indices 6%5,7%5,8%5,9%5,10%5)
Call generated code Operator(time_m=6, time_M=10)
Return control to Python
Time block 1
De-serialize indices 1,2,3,4,5
De-compress indices 1,2,3,4,5
(access modulo indices 1%5,2%5,3%5,4%5,5%5)
Call generated code Operator(time_m=1, time_M=5)
Return control to Python
Arrays used to save file offsets and compressed sizes
We use two arrays the length of the total number of time steps to save bookkeeping information used for the serialization and compression. During de-serialization these offsets and lengths will be used to seek the correct location and read the correct length from the binary file saving the compressed data.
Array
Description
file_offset
stores the location of the start of the compressed block for each time step
file_length
stores the length of the compressed block for each time step
Compression note – use of blosc
In this notebook we use blosc compression that is not loaded by default in devito. The first operational cell immediately below ensures that blosc compression and Python wrapper are installed in this jupyter kernel.
Note that blosc provides lossless compression, and in practice one would use lossy compression to achieve significantly better compression ratios. Consider the use of blosc here as a placeholder for your compression method of choice, providing all the essential characteristics of what might be used at scale.
We will use the low level interface to blosc compression because it allows the easiest use of numpy arrays. A synopsis of the compression and decompression calls is shown below for devito TimeFunction\(u\), employing compression level \(9\) of the zstd type with the optional shuffle, at modulo time index kt%M.
c = blosc.compress_ptr(u._data[kt%M,:,:].__array_interface__['data'][0],
np.prod(u2._data[kt%M,:,:].shape),
u._data[kt%M,:,:].dtype.itemsize, 9, True, 'zstd')
blosc.decompress_ptr(u._data[kt,:,:], d.__array_interface__['data'][0])
blosc Reference: * c project and library: https://blosc.org * Python wrapper: https://github.com/Blosc/python-blosc * Python wrapper documentation: http://python-blosc.blosc.org * low level interface to compression call: http://python-blosc.blosc.org/tutorial.html#compressing-from-a-data-pointer
# NBVAL_IGNORE_OUTPUT# Install pyzfp package in the current Jupyter kernelimport sys_ = sys.executable!{sys.executable} -m pip install bloscimport blosc # noqa: E402
We have grouped all imports used in this notebook here for consistency.
import numpy as npfrom examples.seismic import RickerSource, Receiver, TimeAxisfrom devito import (Grid, Function, TimeFunction, SpaceDimension, Constant, Eq, Operator, configuration, norm, Buffer)from examples.seismic.self_adjoint import setup_w_over_qimport matplotlib as mplimport matplotlib.pyplot as pltfrom matplotlib import cmimport copyimport os# These lines force images to be displayed in the notebook, and scale up fonts%matplotlib inlinempl.rc('font', size=14)# Make white background for plots, not transparentplt.rcParams['figure.facecolor'] ='white'# Set logging to debug, captures statistics on the performance of operators# configuration['log-level'] = 'DEBUG'configuration['log-level'] ='INFO'
Instantiate the model for a two dimensional problem
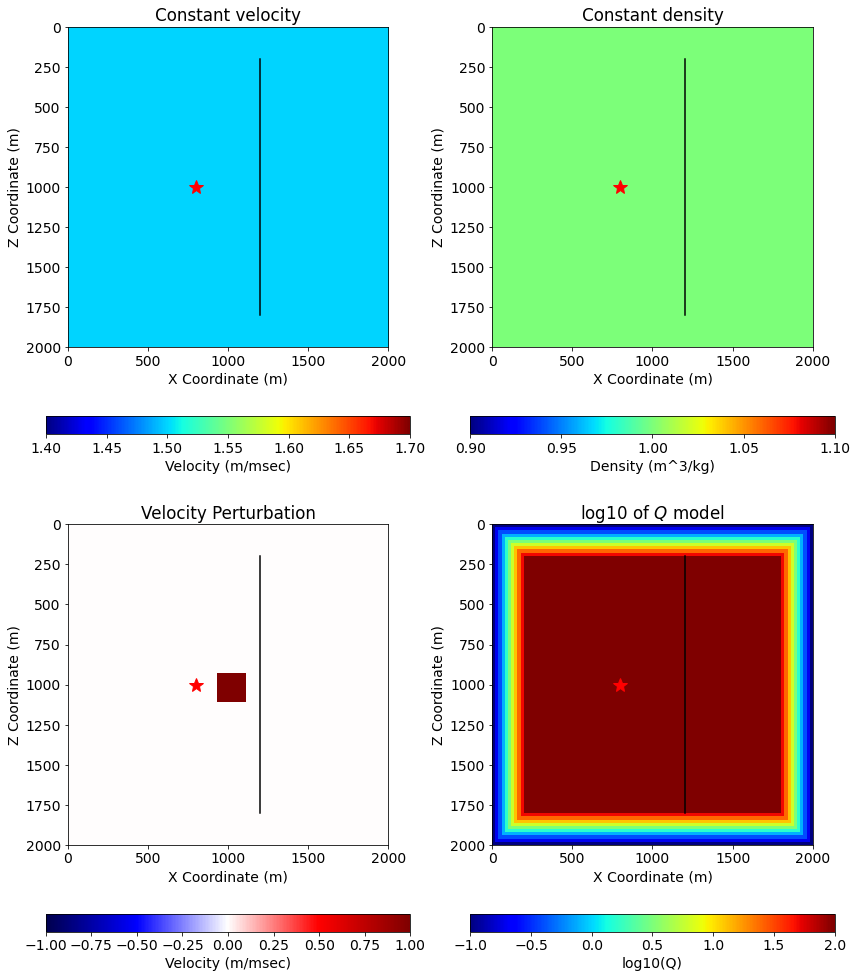
We are aiming at a small model as this is a POC. - 101 x 101 cell model - 20x20 m discretization - Modeling sample rate explicitly chosen: 2.5 msec - Time range 250 milliseconds (101 time steps) - Wholespace model - velocity: 1500 m/s - density: 1 g/cm^3 - Source to left of center - Vertical line of receivers to right of center - Velocity perturbation box for linearized ops in center of model - Visco-acoustic absorbing boundary from the self-adjoint operators linked above, 10 points on exterior boundaries. - We generate a velocity perturbation for the linearized forward Jacobian operator
# NBVAL_IGNORE_OUTPUT# Define dimensions for the interior of the modelnx, nz =101, 101npad =10dx, dz =20.0, 20.0# Grid spacing in mshape = (nx, nz) # Number of grid pointsspacing = (dx, dz) # Domain size is now 5 km by 5 kmorigin = (0., 0.) # Origin of coordinate system, specified in m.extent =tuple([s*(n-1) for s, n inzip(spacing, shape, strict=True)])# Define the dimensionsx = SpaceDimension(name='x', spacing=Constant(name='h_x', value=extent[0]/(shape[0]-1)))z = SpaceDimension(name='z', spacing=Constant(name='h_z', value=extent[1]/(shape[1]-1)))# Initialize the Devito griddtype = np.float32grid = Grid(extent=extent, shape=shape, origin=origin, dimensions=(x, z), dtype=dtype)print("shape; ", shape)print("origin; ", origin)print("spacing; ", spacing)print("extent; ", extent)print("")print("grid.shape; ", grid.shape)print("grid.extent; ", grid.extent)print("grid.spacing_map;", grid.spacing_map)# Create velocity and buoyancy fields.space_order =8m0 = Function(name='m0', grid=grid, space_order=space_order)b = Function(name='b', grid=grid, space_order=space_order)m0.data[:] =1.5b.data[:, :] =1.0/1.0# Perturbation to velocity: a square offset from the center of the modeldm = Function(name='dm', grid=grid, space_order=space_order)size =4x0 = (nx-1)//2+1z0 = (nz-1)//2+1dm.data[:] =0.0dm.data[(x0-size):(x0+size+1), (z0-size):(z0+size+1)] =1.0# Initialize the attenuation profile for the absorbing boundaryfpeak =0.001w =2.0* np.pi * fpeakqmin =0.1wOverQ = Function(name='wOverQ_025', grid=grid, space_order=space_order)setup_w_over_q(wOverQ, w, qmin, 100.0, npad)# Time samplingt0 =0# Simulation time starttn =250# Simulation time enddt =2.5# Simulation time step intervaltime_range = TimeAxis(start=t0, stop=tn, step=dt)nt = time_range.numprint("")print("time_range; ", time_range)# Source 10 Hz center frequencysrc = RickerSource(name='src', grid=grid, f0=fpeak, npoint=1, time_range=time_range)src.coordinates.data[0, :] = [dx * ((nx-1) /2-10), dz * (nz-1) /2]# Receivers: for nonlinear forward and linearized forward# one copy each for save all and time blocking implementationsnr =51z1 = dz * ((nz -1) /2-40)z2 = dz * ((nz -1) /2+40)nl_rec1 = Receiver(name='nl_rec1', grid=grid, npoint=nr, time_range=time_range)nl_rec2 = Receiver(name='nl_rec2', grid=grid, npoint=nr, time_range=time_range)ln_rec1 = Receiver(name='ln_rec1', grid=grid, npoint=nr, time_range=time_range)ln_rec2 = Receiver(name='ln_rec2', grid=grid, npoint=nr, time_range=time_range)nl_rec1.coordinates.data[:, 0] = nl_rec2.coordinates.data[:, 0] =\ ln_rec1.coordinates.data[:, 0] = ln_rec2.coordinates.data[:, 0] = dx * ((nx-1) /2+10)nl_rec1.coordinates.data[:, 1] = nl_rec2.coordinates.data[:, 1] =\ ln_rec1.coordinates.data[:, 1] = ln_rec2.coordinates.data[:, 1] = np.linspace(z1, z2, nr)print("")print(f"src_coordinate X; {src.coordinates.data[0, 0]:+12.4f}")print(f"src_coordinate Z; {src.coordinates.data[0, 1]:+12.4f}")print(f'rec_coordinates X min/max; {np.min(nl_rec1.coordinates.data[:, 0]):+12.4f} 'f'{np.max(nl_rec1.coordinates.data[:, 0]):+12.4f}')print(f'rec_coordinates Z min/max; {np.min(nl_rec1.coordinates.data[:, 1]):+12.4f} 'f'{np.max(nl_rec1.coordinates.data[:, 1]):+12.4f}')
Next we plot the velocity and density models for illustration, with source location shown as a large red asterisk and receiver line shown as a black line.
\[
\frac{b}{m^2} L_t[u] =
\overleftarrow{\partial_x}\left(b\ \overrightarrow{\partial_x}\ u \right) +
\overleftarrow{\partial_y}\left(b\ \overrightarrow{\partial_y}\ u \right) +
\overleftarrow{\partial_z}\left(b\ \overrightarrow{\partial_z}\ u \right) + q
\]
Quantity that is serialized
Recall that for Jacobian operators we need the scaled time derivatives of the reference wavefield for both the Born source in the Jacobian forward, and the imaging condition in the Jacobian adjoint. The quantity shown below is used in those expressions, and this is what we will serialize and compress during the nonlinear forward.
\[
\frac{2\ b}{m_0}\ L_t[u_0]
\]
The two implementations
We borrow the stencil from the self-adjoint operators shown in the jupyter notebooks linked above, and make two operators. Here are details about the configuration.
Save all time steps implementation
wavefield for propagation: u1 = TimeFunctions(..., save=None)
wavefield for serialization: v1 = TimeFunctions(..., save=nt)
Run the operator in a single execution from time_m=1 to time_M=nt-1
Time blocking implementation
wavefield for propagation: u2 = TimeFunctions(..., save=None)
wavefield for serialization: v2 = TimeFunctions(..., save=Buffer(M))
Run the operator in a sequence of time blocks, each with \(M\) time steps, from time_m=1 to time_M=nt-1
Note on code duplication
The stencils for the two operators you see below are exactly the same, the only significant difference is that we use two different TimeFunctions. We could therefore reduce code duplication in two ways:
Write a function and use it to build the stencils.
To increase the clarity of the exposition below, We do neither of these and duplicate the stencil code.
# NBVAL_IGNORE_OUTPUT# Define M: number of time steps in each time blockM =5# Create TimeFunctionsu1 = TimeFunction(name="u1", grid=grid, time_order=2, space_order=space_order, save=None)u2 = TimeFunction(name="u2", grid=grid, time_order=2, space_order=space_order, save=None)v1 = TimeFunction(name="v1", grid=grid, time_order=2, space_order=space_order, save=nt)v2 = TimeFunction(name="v2", grid=grid, time_order=2, space_order=space_order, save=Buffer(M))# get time and space dimensionst, x, z = u1.dimensions# Source terms (see notebooks linked above for more detail)src1_term = src.inject(field=u1.forward, expr=src * t.spacing**2* m0**2/ b)src2_term = src.inject(field=u2.forward, expr=src * t.spacing**2* m0**2/ b)nl_rec1_term = nl_rec1.interpolate(expr=u1.forward)nl_rec2_term = nl_rec2.interpolate(expr=u2.forward)# The nonlinear forward time update equationupdate1 = (t.spacing**2* m0**2/ b) *\ ((b * u1.dx(x0=x+x.spacing/2)).dx(x0=x-x.spacing/2) + (b * u1.dz(x0=z+z.spacing/2)).dz(x0=z-z.spacing/2)) +\ (2- t.spacing * wOverQ) * u1 +\ (t.spacing * wOverQ -1) * u1.backwardupdate2 = (t.spacing**2* m0**2/ b) *\ ((b * u2.dx(x0=x+x.spacing/2)).dx(x0=x-x.spacing/2) + (b * u2.dz(x0=z+z.spacing/2)).dz(x0=z-z.spacing/2)) +\ (2- t.spacing * wOverQ) * u2 +\ (t.spacing * wOverQ -1) * u2.backwardstencil1 = Eq(u1.forward, update1)stencil2 = Eq(u2.forward, update2)# Equations for the Born termv1_term = Eq(v1, (2* b * m0**-3) * (wOverQ * u1.dt(x0=t-t.spacing/2) + u1.dt2))v2_term = Eq(v2, (2* b * m0**-3) * (wOverQ * u2.dt(x0=t-t.spacing/2) + u2.dt2))# Update spacing_map (see notebooks linked above for more detail)spacing_map = grid.spacing_mapspacing_map.update({t.spacing: dt})# Build the Operatorsnl_op1 = Operator([stencil1, src1_term, nl_rec1_term, v1_term], subs=spacing_map)nl_op2 = Operator([stencil2, src2_term, nl_rec2_term, v2_term], subs=spacing_map)# Run operator 1 for all time samplesu1.data[:] =0v1.data[:] =0nl_rec1.data[:] =0nl_op1(time_m=1, time_M=nt-2)None
Operator `Kernel` ran in 0.01 s
# NBVAL_IGNORE_OUTPUT# Continuous integration hooks for the save all timesteps implementation# We ensure the norm of these computed wavefields is repeatableprint(f"{norm(u1):.3e}")print(f"{norm(nl_rec1):.3e}")print(f"{norm(v1):.3e}")assert np.isclose(norm(u1), 4.145e+01, atol=0, rtol=1e-3)assert np.isclose(norm(nl_rec1), 2.669e-03, atol=0, rtol=1e-3)assert np.isclose(norm(v1), 1.381e-02, atol=0, rtol=1e-3)
4.145e+01
2.669e-03
1.381e-02
Run the time blocking implementation over blocks of M time steps
After each block of \(M\) time steps, we return control to Python to extract the Born term and serialize/compress.
The next cell exercises the time blocking operator over \(N\) time blocks.
# NBVAL_IGNORE_OUTPUT# We make an array the full size for correctness testingv2_all = np.zeros(v1.data.shape, dtype=dtype)# Number of time blocksN =int((nt-1) / M) +1# Open a binary file in append mode to save the wavefield chunksfilename ="timeblocking.nonlinear.bin"if os.path.exists(filename): os.remove(filename)withopen(filename, "ab") as f:# Arrays to save offset and length of compressed data file_offset = np.zeros(nt, dtype=np.int64) file_length = np.zeros(nt, dtype=np.int64)# The length of the data type, 4 bytes for float32 itemsize = v2.data[0, :, :].dtype.itemsize# The length of a an uncompressed wavefield, used to compute compression ratio below len0 =4.0* np.prod(v2._data[0, :, :].shape)# Loop over time blocks v2_all[:] =0 u2.data[:] =0 v2.data[:] =0 nl_rec2.data[:] =0for kN inrange(0, N, 1): kt1 =max((kN +0) * M, 1) kt2 =min((kN +1) * M -1, nt-2) nl_op2(time_m=kt1, time_M=kt2)# Copy computed Born term for correctness testingfor kt inrange(kt1, kt2+1):# assign v2_all[kt, :, :] = v2.data[(kt % M), :, :]# compression c = blosc.compress_ptr(v2._data[(kt % M), :, :].__array_interface__['data'][0], np.prod(v2._data[(kt % M), :, :].shape), v2._data[(kt % M), :, :].dtype.itemsize, 9, True, 'zstd')# compression ratio cratio = len0 / (1.0*len(c))# serialization file_offset[kt] = f.tell() f.write(c) file_length[kt] =len(c)# Uncomment these lines to see per time step output# rms_v1 = np.linalg.norm(v1.data[kt,:,:].reshape(-1))# rms_v2 = np.linalg.norm(v2_all[kt,:,:].reshape(-1))# rms_12 = np.linalg.norm(v1.data[kt,:,:].reshape(-1) - v2_all[kt,:,:].reshape(-1))# print("kt1,kt2,len,cratio,|u1|,|u2|,|v1-v2|; %3d %3d %3d %10.4f %12.6e %12.6e %12.6e" %# (kt1, kt2, kt2 - kt1 + 1, cratio, rms_v1, rms_v2, rms_12), flush=True)
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
# NBVAL_IGNORE_OUTPUT# Continuous integration hooks for the time blocking implementation# We ensure the norm of these computed wavefields is repeatable# Note these are exactly the same norm values as the save all timesteps check aboveprint(f"{norm(nl_rec1):.3e}")print(f"{np.linalg.norm(v2_all):.3e}")assert np.isclose(norm(nl_rec1), 2.669e-03, atol=0, rtol=1e-3)assert np.isclose(np.linalg.norm(v2_all), 1.381e-02, atol=0, rtol=1e-3)
2.669e-03
1.381e-02
Correctness test for nonlinear forward wavefield
We now test correctness by measuring the maximum absolute difference between the wavefields computed with theBuffer and save all time steps implementations.
Relative norm of difference wavefield; +0.0000e+00
Implementation of Jacobian linearized forward
As before we have two implementations: 1. operates on all time steps in a single implementation and consumes the all time steps saved version of the nonlinear forward wavefield 1. operates in time blocks, de-serializes and de-compresses \(M\) time steps at a time, and consumes the compressed and serialized time blocking version of the nonlinear forward wavefield
One difference in the correctness testing for this case is that we will assign the propagated perturbed wavefields to two TimeFunction(..., save=nt) for comparison.
# NBVAL_IGNORE_OUTPUT# Continuous integration hooks for the save all timesteps implementation# We ensure the norm of these computed wavefields is repeatableprint(f"{norm(duFwd1):.3e}")print(f"{norm(ln_rec1):.3e}")assert np.isclose(norm(duFwd1), 6.438e+00, atol=0, rtol=1e-3)assert np.isclose(norm(ln_rec1), 2.681e-02, atol=0, rtol=1e-3)
6.438e+00
2.681e-02
Run the time blocking implementation over blocks of M time steps
Before each block of \(M\) time steps, we de-serialize and de-compress.
TODO
In the linearized op below figure out how to use a pre-allocated array to hold the compressed bytes, instead of returning a new bytearray each time we read. Note this will not be a problem when not using Python, and there surely must be a way.
# NBVAL_IGNORE_OUTPUT# Open the binary file in read only modewithopen(filename, "rb") as f:# Temporary nd array for decompression d = copy.copy(v2._data[0, :, :])# Array to hold compression ratio cratio = np.zeros(nt, dtype=dtype)# Loop over time blocks duFwd2.data[:] =0 ln_rec2.data[:] =0for kN inrange(0, N, 1): kt1 =max((kN +0) * M, 1) kt2 =min((kN +1) * M -1, nt-2)# 1. Seek to file_offset[kt]# 2. Read file_length[kt1] bytes from file# 3. Decompress wavefield and assign to v2 Bufferfor kt inrange(kt1, kt2+1): f.seek(file_offset[kt], 0) c = f.read(file_length[kt]) blosc.decompress_ptr(c, v2._data[(kt % M), :, :].__array_interface__['data'][0]) cratio[kt] = len0 / (1.0*len(c))# Run the operator for this time block lf_op2(time_m=kt1, time_M=kt2)# Uncomment these lines to see per time step outputs# for kt in range(kt1,kt2+1):# rms_du1 = np.linalg.norm(duFwd1.data[kt,:,:].reshape(-1))# rms_du2 = np.linalg.norm(duFwd2.data[kt,:,:].reshape(-1))# rms_d12 = np.linalg.norm(duFwd1.data[kt,:,:].reshape(-1) - duFwd2.data[kt,:,:].reshape(-1))# print("kt1,kt2,len,cratio,|du1|,|du2|,|du1-du2|; %3d %3d %3d %10.4f %12.6e %12.6e %12.6e" %# (kt1, kt2, kt2 - kt1 + 1, cratio[kt], rms_du1, rms_du2, rms_d12), flush=True)
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
# NBVAL_IGNORE_OUTPUT# Continuous integration hooks for the save all timesteps implementation# We ensure the norm of these computed wavefields is repeatable# Note these are exactly the same norm values as the save all timesteps check aboveprint(f"{norm(duFwd2):.3e}")print(f"{norm(ln_rec2):.3e}")assert np.isclose(norm(duFwd2), 6.438e+00, atol=0, rtol=1e-3)assert np.isclose(norm(ln_rec2), 2.681e-02, atol=0, rtol=1e-3)
6.438e+00
2.681e-02
Correctness test for Jacobian forward wavefield
We now test correctness by measuring the maximum absolute difference between the wavefields computed with theBuffer and save all time steps implementations.
Relative norm of difference wavefield; +0.0000e+00
Implementation of Jacobian linearized adjoint
Again we have two implementations: 1. operates on all time steps in a single implementation and consumes the all time steps saved version of the nonlinear forward wavefield 1. operates in time blocks, de-serializes and de-compresses \(M\) time steps at a time, and consumes the compressed and serialized time blocking version of the nonlinear forward wavefield
For correctness testing here we will compare the final gradients computed via these two implementations.
# NBVAL_IGNORE_OUTPUT# Create TimeFunctions for adjoint wavefieldsduAdj1 = TimeFunction(name="duAdj1", grid=grid, time_order=2, space_order=space_order, save=nt)duAdj2 = TimeFunction(name="duAdj2", grid=grid, time_order=2, space_order=space_order, save=nt)# Create Functions to hold the computed gradientsdm1 = Function(name='dm1', grid=grid, space_order=space_order)dm2 = Function(name='dm2', grid=grid, space_order=space_order)# The Jacobian linearized adjoint time update equationupdate1 = (t.spacing**2* m0**2/ b) *\ ((b * duAdj1.dx(x0=x+x.spacing/2)).dx(x0=x-x.spacing/2) + (b * duAdj1.dz(x0=z+z.spacing/2)).dz(x0=z-z.spacing/2)) +\ (2- t.spacing * wOverQ) * duAdj1 +\ (t.spacing * wOverQ -1) * duAdj1.forwardupdate2 = (t.spacing**2* m0**2/ b) *\ ((b * duAdj2.dx(x0=x+x.spacing/2)).dx(x0=x-x.spacing/2) + (b * duAdj2.dz(x0=z+z.spacing/2)).dz(x0=z-z.spacing/2)) +\ (2- t.spacing * wOverQ) * duAdj2 +\ (t.spacing * wOverQ -1) * duAdj2.forwardstencil1 = Eq(duAdj1.backward, update1)stencil2 = Eq(duAdj2.backward, update2)# Equations to sum the zero lag correlationsdm1_update = Eq(dm1, dm1 + duAdj1 * v1)dm2_update = Eq(dm2, dm2 + duAdj2 * v2)# We will inject the Jacobian linearized forward receiver data, time reversedla_rec1_term = ln_rec1.inject(field=duAdj1.backward, expr=ln_rec1 * t.spacing**2* m0**2/ b)la_rec2_term = ln_rec2.inject(field=duAdj2.backward, expr=ln_rec2 * t.spacing**2* m0**2/ b)# Build the Operatorsla_op1 = Operator([dm1_update, stencil1, la_rec1_term], subs=spacing_map)la_op2 = Operator([dm2_update, stencil2, la_rec2_term], subs=spacing_map)# Run operator 1 for all time samplesduAdj1.data[:] =0dm1.data[:] =0la_op1(time_m=1, time_M=nt-2)None
Operator `Kernel` ran in 0.01 s
# NBVAL_IGNORE_OUTPUT# Continuous integration hooks for the save all timesteps implementation# We ensure the norm of these computed wavefields is repeatableprint(f"{norm(duAdj1):.3e}")print(f"{norm(dm1):.3e}")assert np.isclose(norm(duAdj1), 4.626e+01, atol=0, rtol=1e-3)assert np.isclose(norm(dm1), 1.426e-04, atol=0, rtol=1e-3)
4.626e+01
1.426e-04
Run the time blocking implementation over blocks of M time steps
Before each block of \(M\) time steps, we de-serialize and de-compress.
# NBVAL_IGNORE_OUTPUT# Open the binary file in read only modewithopen(filename, "rb") as f:# Temporary nd array for decompression d = copy.copy(v2._data[0, :, :])# Array to hold compression ratio cratio = np.zeros(nt, dtype=dtype)# Loop over time blocks duAdj2.data[:] =0 dm2.data[:] =0for kN inrange(N-1, -1, -1): kt1 =max((kN +0) * M, 1) kt2 =min((kN +1) * M -1, nt-2)# 1. Seek to file_offset[kt]# 2. Read file_length[kt1] bytes from file# 3. Decompress wavefield and assign to v2 Bufferfor kt inrange(kt1, kt2+1, +1): f.seek(file_offset[kt], 0) c = f.read(file_length[kt]) blosc.decompress_ptr(c, v2._data[(kt % M), :, :].__array_interface__['data'][0]) cratio[kt] = len0 / (1.0*len(c))# Run the operator for this time block la_op2(time_m=kt1, time_M=kt2)# Uncomment these lines to see per time step outputs# for kt in range(kt2,kt1-1,-1):# rms_du1 = np.linalg.norm(duAdj1.data[kt,:,:].reshape(-1))# rms_du2 = np.linalg.norm(duAdj2.data[kt,:,:].reshape(-1))# rms_d12 = np.linalg.norm(duAdj1.data[kt,:,:].reshape(-1) - duAdj2.data[kt,:,:].reshape(-1))# print("kt2,kt1,kt,cratio,|du1|,|du2|,|du1-du2|; %3d %3d %3d %10.4f %12.6e %12.6e %12.6e" %# (kt2, kt1, kt, cratio[kt], rms_du1, rms_du2, rms_d12), flush=True)
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
Operator `Kernel` ran in 0.01 s
# NBVAL_IGNORE_OUTPUT# Continuous integration hooks for the save all timesteps implementation# We ensure the norm of these computed wavefields is repeatable# Note these are exactly the same norm values as the save all timesteps check aboveprint(f"{norm(duAdj2):.3e}")print(f"{norm(dm2):.3e}")assert np.isclose(norm(duAdj2), 4.626e+01, atol=0, rtol=1e-3)assert np.isclose(norm(dm2), 1.426e-04, atol=0, rtol=1e-3)
4.626e+01
1.426e-04
Correctness test for Jacobian adjoint wavefield and computed gradient
We now test correctness by measuring the maximum absolute difference between the gradients computed with theBuffer and save all time steps implementations.